| |
||
DAVID MILLER
|
||
|
|
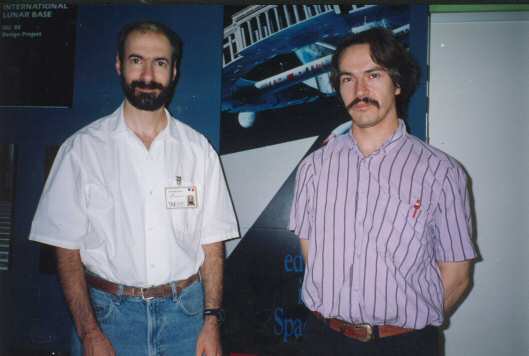
En la
imagen, David Miller (izda.) y Jorge Munnshe (der.) Foto: M.A.
 David
Miller se graduó con honores en astronomía por la Universidad de
Wesleyan en 1981. Cuatro años después lo hizo en ciencias informáticas
por la Universidad de Yale. De 1985 a 1988 fue profesor asistente en el
Instituto Politécnico de Virginia. De 1988 a 1993 trabajó en el Jet
Propulsion Laboratory de la NASA, en tanto que actuaba como profesor
visitante en el Laboratorio de Inteligencia Artificial del prestigioso
MIT (Instituto de Tecnología de Massachusetts) y en el Caltech
(Instituto de Tecnología de California). Su trabajo en la NASA
consistió en el desarrollo de microrrobots exploradores para otros
planetas, en especial Marte. Debido a su brillante labor, Miller
recibió de la NASA en 1993 la Medalla al Servicio Excepcional. En 1993
empezó a desempeñar su labor en la compañía Mitre Corporation, que
ofrece asesoría técnica al gobierno estadounidense. Entre los proyectos
en que ha trabajado últimamente, figuran el diseño de un robot orbital
capaz de maniobrar y reparar satélites, y la adaptación de la
tecnología usada en los robots planetarios para su empleo en sillas de
ruedas destinadas a minusválidos profundos. También ha participado como
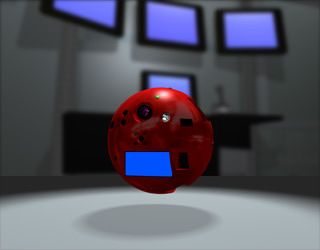
profesor en la Universidad Internacional del Espacio. En
la imagen, uno de los robots en cuyo desarrollo ha participado David
Miller. Este robot flotante, diseñado para funcionar en ingravidez,
dentro de naves espaciales presurizadas, es del tamaño de una pequeña
pelota y se autopropulsa mediante diminutas hélices. Foto: NASA.
 En su opinión, ¿cuáles son las
características más importantes que debe poseer todo vehículo robótico
enviado a la superficie de Marte? En la
imagen, un robot (modelo Rocky IV) en cuyo desarrollo participó David
Miller. Foto: NASA
 "O sea que
el vehículo debe estar diseñado para afrontar agresiones
previsibles y no tan previsibles, y además ser capaz de actuar por su
cuenta, porque no hay modo de ayudarle. Debe ser capaz de enfrentarse a
todo tipo de situaciones de emergencia, incluido un resbalón pendiente
abajo. El vehículo debe evitar aventurarse por terrenos demasiado
peligrosos o avanzar por ellos con mucha cautela, preparado para dar
marcha atrás en cualquier momento. No puede basarse en las ordenes que
reciba de la lejana Tierra, necesita tener algo de astucia propia". ¿Con qué tipo de sensores y
de
señales suelen trabajar los robots en cuyo desarrollo usted ha
participado?
"Usan cuatro sensores principales. Uno está en contacto con la superficie, advirtiendo las rugosidades del mismo, y alertando al sistema inteligente de que, por ejemplo, está pasando por encima de una roca. También tenemos codificadores que miden los ángulos de suspensión de cada una de las ruedas, sobre el chasis; de manera que si el vehículo pasa sobre un desnivel muy pronunciado, el chasis puede doblarse para adaptarse al mismo si el vehículo decide continuar por ese camino. También está un sistema parecido a un proyector, que utiliza una pequeña cámara y uno o varios haces láser, que son emitidos en diferentes direcciones. Si el terreno es llano, la banda irá en línea recta. Pero si en medio de ella se interpone alguna elevación o pedrusco, incidirá contra ella y la cámara podrá ver la deformación de la banda, advirtiendo que hay un objeto enfrente del robot". Otra imagen del robot flotante PSA, en
cuyo desarrollo David Miller ha participado. Foto: NASA.
¿Qué clase de prototipos
considera más útiles: los que tienen ruedas o los que tienen patas? "De
otro
lado, la capacidad de actuación autónoma desarrollada para robots
planetarios ofrece ventajas en ese escenario con respecto a los
ingenios convencionales teledirigidos. Es muy difícil guiar desde fuera
a un ingenio que avanza dentro de una zona radiactiva. Las
comunicaciones se ven amenazadas. ¿Qué pasa si se produce un corte
momentáneo y el vehículo resulta dañado en una maniobra incorrecta? En
una emergencia de tal calibre, debe evitarse que algo así pueda
suceder. Los microrrobots también pueden tener utilidades más
ordinarias, como por ejemplo examinar el interior de la estructura de
un edificio para comprobar si hay termitas en su interior, sin
necesidad de abrir tabiques. Un microrrobot podría detectarlas e
informar de en qué lugares se concentran, para así poder inyectar
insecticida en los puntos idóneos. Creo que a medida que se abaraten
los costes de fabricación de estos ingenios, la gente les encontrará
múltiples usos.". ¿Qué piensa de las
aplicaciones
en la astronáutica de la Telepresencia, el control remoto mediante
Realidad Virtual?
"Creo que la Telepresencia es muy útil para dirigir robots en la Tierra, ya que resulta mucho más fácil de operar que los sistemas normales de control remoto, debido a que cuando lo usas te sientes como si fueses el robot, con las ventajas que ello supone tanto en la percepción de información sensorial como en el guiado del mismo. También puede ser un excelente medio para ofrecer al Ser Humano experiencias incompatibles con su presencia física. Por ejemplo, empleada en cirugía, la Telepresencia puede permitir que el médico explore el interior del cuerpo humano como si en cierto modo viajase por él. Gracias a esta técnica, podemos aprender muchísimas cosas. En cuanto a su uso para explorar otros planetas desde la Tierra, resulta mucho menos útil a causa del retardo en el tiempo causado por la gran distancia entre el operador y el robot. Por ejemplo, si giras la cabeza para contemplar qué hay a un lado, y la cámara tarda cuarenta minutos en ofrecerte la vista deseada, es obvio que no puedes sentirte como si estuvieras dentro del robot. Sin embargo, la Realidad Virtual tiene otros usos espaciales en la Tierra. Si un robot explorador toma multitud de fotos, las suficientes como para que una vez enviadas a la Tierra puedan ser empleadas para elaborar un modelo tridimensional por ordenador, entonces la Realidad Virtual puede permitir que la gente penetre en ese modelo y pasee por él como si de verdad estuviera en Marte o en la Luna. En este sentido, puede ser una técnica de gran valor, educativa y a la vez excitante". ¿Cómo ve el paso desde el estadio de la microelectrónica hasta el más pequeño, el de la llamada nanotecnología? "Pienso que puede ser una revolución tremendamente impactante. Ahora comenzamos a tener las primeras muestras de lo que supondrá. Algunos de los instrumentos que volarán en misiones espaciales de los próximos años, utilizan nanotecnología. En el Jet Propulsion Laboratory de la NASA tienen un sismómetro que trabaja con una masa de referencia de un gramo en vez de la de veinte kilos típica de los instrumentos convencionales. Estamos tan sólo comenzando a vislumbrar los grandes beneficios que puede traernos la nanotecnología. Si para un robot puedes reunir un ordenador de silicio, instrumentos de silicio, células solares de silicio, y los elementos mecánicos de silicio en los que algunos científicos están trabajando, entonces es concebible que puedas hacer un robot entero en un chip. Los usos prácticos de estos robots minúsculos son muchos. Por ejemplo, puedes depositarlos en la esquina de una mesa, y cada noche ellos barrerán todo el polvo de la mesa, tras lo cual regresarán a su esquina, dentro de un cubículo del tamaño de un dedal. Para averiguar si hay agua en Marte, bastaría enviar un orbitador que esparciera un kilo de robots. Estos descenderían hacia la superficie, y una vez en ella no se detendrían hasta hallar agua. Cuando lo lograsen, se estacionarían allí y enviarían una señal al orbitador, de modo que su posición sería conocida. Este es un perfil de misión absolutamente distinto al de las convencionales. " "Para
usos
médicos, la nanotecnología también ofrece grandes ventajas. Si una
arteria se está obstruyendo, puedes enviar a su interior varios robots
que se encarguen de destaponar la arteria con pequeños mordiscos,
abriendo paso al flujo sanguíneo. Si, como parece, todas las
previsiones técnicas se cumplen, cosas así se harán realidad. No creo
que pase mucho tiempo. Estoy convencido de que se conseguirá en el
transcurso de nuestras vidas. Cada dieciocho meses la velocidad de las
computadoras se duplica, y esto se ha venido registrando por lo menos
desde los últimos quince años. Para que en el ordenador de un vehículo
robótico funcione un programa de Inteligencia Artificial, el sistema
necesita tener una enorme capacidad de cálculo, que requiere
alimentarse de una cantidad elevada de electricidad, por lo que se
precisan baterías. Esto dificulta la miniaturización de los robots.
Pero, como los ordenadores son cada vez más pequeños y veloces, este es
otro problema en vías de solución. Estoy muy esperanzado respecto al
futuro de los microrrobots". En la imagen, el robot Robby, en
cuyo desarrollo David Miller participó. Foto: NASA. ¿Qué piensa del debate
existente
entre los partidarios de los viajes espaciales tripulados y quienes
cuestionan su utilidad considerando a los vehículos automáticos una
inversión de más provecho?
"Depende de la misión. Obviamente, si quieres explorar Plutón, no enviarás una misión tripulada, pues la distancia y el tiempo de viaje son demasiado grandes. Si pretendes analizar de qué están hechas las rocas de Marte, no enviarás una misión tripulada sólo para eso, puesto que habría que arriesgar vidas humanas y resultaría mucho más caro que enviar un robot, el cual es capaz por completo de tomar una muestra de roca, y analizarla. Ahora bien, si quieres que los seres humanos viajen a otros planetas, que nuestra especie se expanda fuera de la Tierra y pise otros mundos, es evidente que necesitas personas. Y creo que ese es un anhelo profundo del Ser Humano. Queremos salir y conocer nuevos mundos. Pienso que es necesario para el espíritu de la humanidad que tengamos misiones tripuladas. No obstante, las misiones de exploración preliminar, las avanzadillas para un primer contacto, deben ser realizadas mediante robots, ya que de este modo resultan más seguras y baratas, y nos permiten saber cómo y dónde enviar una expedición de aterrizaje con las mayores garantías de seguridad y de interés científico. Pienso que tomar fotos y muestras es una tarea más adecuada para robots que para personas". |
|
|
|
||
|
Copyright
© 1995-1998 Amazings.com. All Rights Reserved. |
||